|
农业田间行走机器人
|
||||
| 专利号: | 0 | 所属分类: | 农林渔牧/食品 | |
| 创意来源: | 东方红 | 创意进度: | 创意提交 | |
| 单位来源: | 安徽农业大学 | 发布时间: | 2017-11-16 | |
| 创意专栏: | 东方红杯第一届全国大学生智能农业装备创新大赛 | 创意发明人: | 安徽农业大学 | |
我要分享:
|
||||
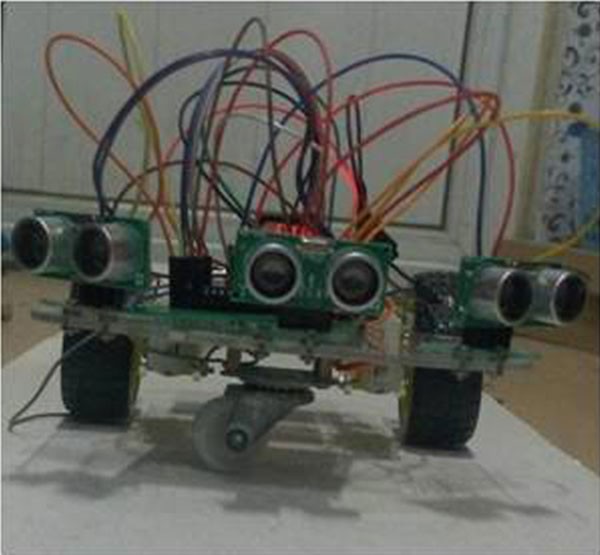
本项目实现的目标是田间行走机器人能在最短时间内遍历所有垄,并成功躲避随机设置的一个障碍。
以此为方向制作的智能小车包括主处理器控制模块设计,传感器模块设计两个方面,其中传感器模块又包括防撞块和壁障模式。通过模块与模块之间相互配合实现快速移动和智能壁两个功能,车体由亚格力板激光切割而成。将两台直流电动机设计在两主动轮上,采用了两轮差动控制的方法,前轮采用万向轮的结构。采用可靠性高,抗干扰能力强,系统实时性较好的IAP15W4K58S4微控制器为核心搭建了智能小车的控制系统的硬件平台,通过了广电,超声波传感器等来实现智能小车额的要求功能。通过运动学分析建立的数学模型,为小车智能行走建立了基础。经过多次的实验调试,最终实现了小车的智能行走。
通过程序的优化减少传感器返回处理的时间
根据实际场地数据以及现场调试确定光电传感器的最适传感距离。
调节PWM调整曲线使小车具备最有的加速减速性能
调试最适电机行径时间来控制小车行走路程
将光电传感器分放安置在小车不同的位置上,并安置超声波模块,使数据收集得到精准最大化
采用对数学模型的建立综合分析所采集的数据。使得结果合理,更智能
该小车可以作为小型只能农业中的智能监测和智能处理的移动搭载平台。他拥有结构可靠稳定、拥有优异的外扩能力、操作方便等特点。在材料加强的情况下,可工作在环境复杂的场所中,具有很好的产品延伸性,未来有较强的发展前景。